



برای انتخاب الگوریتمهای کنترل سیستم پیل سوختی در خودروهای پیل سوختی هیدروژنی، در نظر گرفتن الزامات کنترلی و سطح پیادهسازی بسیار مهم است. یک الگوریتم کنترل خوب، امکان کنترل دقیق سیستم پیل سوختی، حذف خطاهای حالت پایدار و دستیابی به کنترل با دقت بالا را فراهم میکند. محققان الگوریتمهای کنترلی مختلفی را برای سیستمهای پیل سوختی بررسی کردهاند، از جمله کنترل تناسبی-انتگرالی، کنترل فیدبک حالت، کنترل فیدبک منفی پیشبینیکننده قطعهبندیشده، کنترل فیدبک تنظیمکننده خطی درجه دوم و فیدبک غیرخطی رو به جلو و کنترل پیشبینیکننده تعمیمیافته. با این حال، این الگوریتمهای کنترلی به دلیل غیرخطی بودن و عدم قطعیت پارامترهای سیستم پیل سوختی برای خودروهای پیل سوختی هیدروژنی مناسب نیستند. این الگوریتمها محدودیتهایی دارند، به خصوص هنگامی که با تغییرات بار پویا و تغییرات در پارامترهای سیستم مواجه میشوند که منجر به عملکرد حلقه بسته غیرقابل قبول میشود.

در حال حاضر، مناسبترین الگوریتم کنترل برای سیستمهای پیل سوختی، کنترل فازی است. محققان با تکیه بر کنترل فازی، الگوریتم کنترل معقولتری به نام کنترل افزایشی فازی دامنه متغیر ارائه دادهاند. این الگوریتم مزایای کنترل فازی، مانند استقلال از مدلهای دقیق شیء کنترلشده، سادگی ساختار، سازگاری خوب و استحکام را حفظ میکند. علاوه بر این، به مسائل مربوط به دقت پایین حالت پایدار و خطاهای استاتیک که ممکن است در کنترل فازی ایجاد شوند، میپردازد. این الگوریتم با استفاده از عوامل مقیاسبندی برای گسترش یا انقباض دامنه فازی، به طور غیرمستقیم تعداد قوانین کنترل را افزایش میدهد و به صفر خطای حالت پایدار و کنترل با دقت بالا دست مییابد. علاوه بر این، سیستم کنترل افزایشی فازی دامنه متغیر، پاسخ دینامیکی سریعی را در محدوده وسیعی از خطاها نشان میدهد و سیستم را قادر میسازد تا از مناطق مرده تنظیم در محدودههای انحراف کوچک جلوگیری کند و عملکرد دینامیکی و استاتیک سیستم و همچنین استحکام آن را بیشتر بهبود بخشد.
01
غیرخطی بودن و عدم قطعیت پارامترهای سیستم پیل سوختی
اگرچه خودروهای پیل سوختی هیدروژنی مزایایی مانند سر و صدای کم، راندمان بالا، عملکرد خوب در مصرف انرژی و برد طولانی با گاز هیدروژن به عنوان منبع انرژی دارند، اما بسیاری از فرآیندهای انتقال داخلی به طور همزمان در داخل پیل سوختی رخ میدهند، از جمله انتقال حرارت، انتقال بار، انتشار محصول و تأمین گازهای واکنش. در نتیجه، عواملی مانند دما، رطوبت، جریان هوا و جریان به طور ناهموار در امتداد میدان جریان واکنشدهنده توزیع میشوند. این امر باعث ایجاد غیرخطی بودن و عدم قطعیت در سیستم پیل سوختی میشود و اگر این عوامل به درستی کنترل نشوند، میتوانند اثرات نامطلوبی بر عملکرد و وضعیت سلامت پیل سوختی داشته باشند.
02
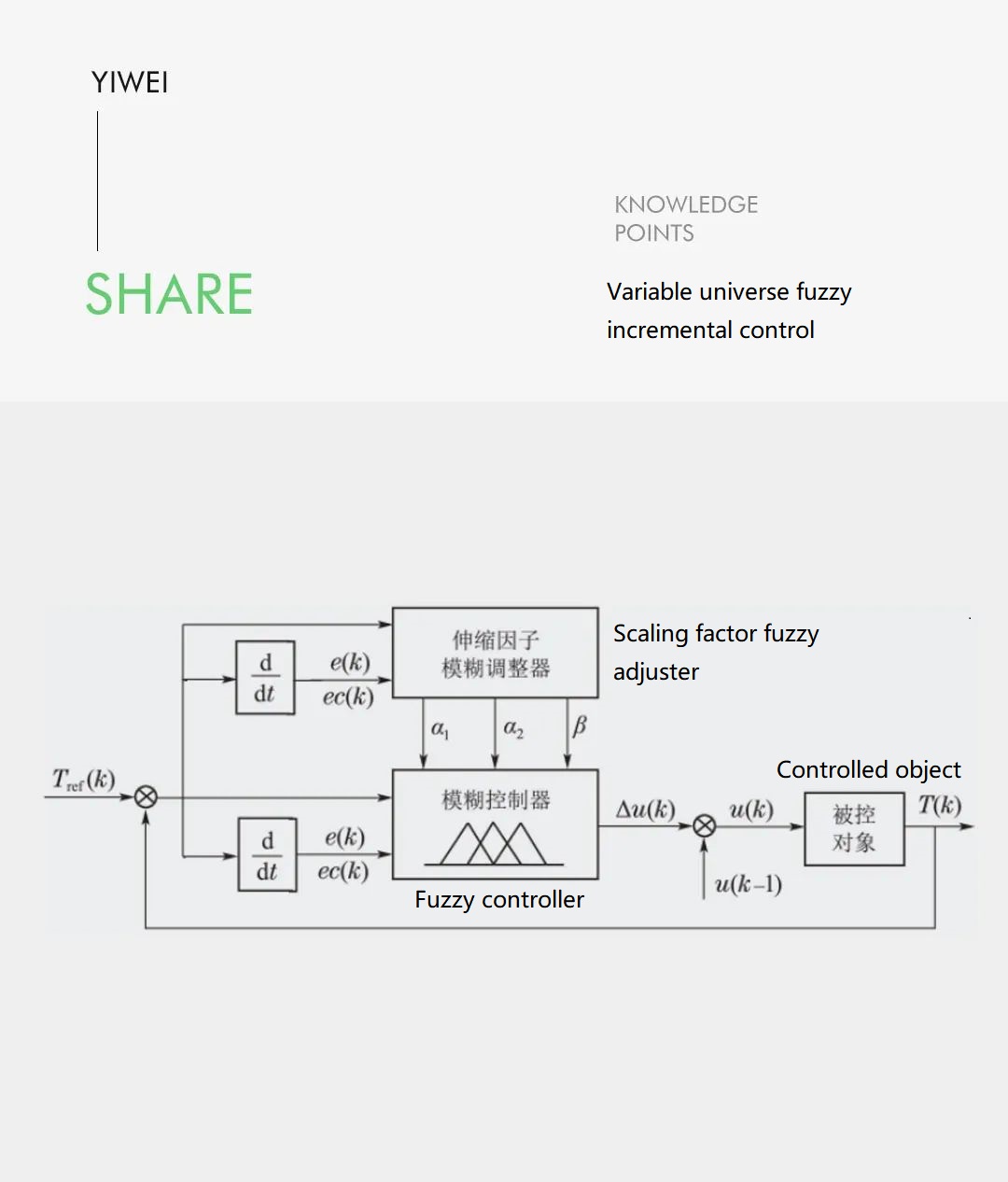
مزایای کنترل افزایشی فازی دامنه متغیر
کنترل افزایشی فازی دامنه متغیر، یک بهینهسازی مبتنی بر کنترل فازی است. این کنترل نه تنها مزایای کنترل فازی، مانند استقلال از مدلهای دقیق شیء کنترلشده، سادگی ساختار، سازگاری خوب و استحکام بالا را حفظ میکند، بلکه به مسائل بالقوه دقت پایین حالت پایدار و خطاهای استاتیک در کنترل فازی نیز میپردازد. با استفاده از ضرایب مقیاسبندی برای گسترش یا انقباض دامنه فازی، میتوان قوانین کنترل را بهطور غیرمستقیم افزایش داد و خطاهای حالت پایدار صفر و کنترل با دقت بالا را امکانپذیر کرد. علاوه بر این، سرعت پاسخ دینامیکی سیستم کنترل افزایشی فازی دامنه متغیر در طیف وسیعی از خطاها سریع است و به سیستم اجازه میدهد از مناطق کور تنظیم در محدودههای انحراف کوچک جلوگیری کند و عملکرد دینامیکی و استاتیک سیستم و همچنین استحکام آن را بیشتر افزایش دهد.
شرکت خودروسازی انرژیهای نو چنگدو ییوی، یک شرکت فناوری پیشرفته است که بر توسعه شاسی برقی، کنترل خودرو، موتور برقی، کنترلکننده موتور، باتری و فناوری اطلاعات شبکه هوشمند خودروهای برقی تمرکز دارد.
تماس با ما:
yanjing@1vtruck.com+(86)13921093681
duanqianyun@1vtruck.com+(86)13060058315
liyan@1vtruck.com+(86)18200390258

زمان ارسال: 11 اکتبر 2023



