



۴. عملکردهای اصلی نرمافزار BMS
l تابع اندازهگیری
(1) اندازهگیری اطلاعات پایه: نظارت بر ولتاژ باتری، سیگنال جریان و دمای بسته باتری. اساسیترین عملکرد سیستم مدیریت باتری، اندازهگیری ولتاژ، جریان و دمای سلولهای باتری است که اساس تمام محاسبات سطح بالا و منطق کنترل سیستم مدیریت باتری است.
(2) تشخیص مقاومت عایق: کل سیستم باتری و سیستم ولتاژ بالا باید توسط سیستم مدیریت باتری از نظر عایق بودن آزمایش شوند.
(3) تشخیص قفل داخلی ولتاژ بالا (HVIL): برای تأیید صحت کل سیستم ولتاژ بالا استفاده میشود. هنگامی که صحت مدار سیستم ولتاژ بالا آسیب ببیند، اقدامات ایمنی فعال میشوند.
لتابع تخمین
(1) تخمین SOC و SOH: بخش اصلی و دشوار
(2) متعادلسازی: عدم تعادل ظرفیت SOC x بین مونومرها را از طریق یک مدار متعادلکننده تنظیم کنید.
(3) محدودیت توان باتری: توان ورودی و خروجی باتری در دماهای مختلف SOC محدود است.
لسایر عملکردها
(1) کنترل رله: شامل رله اصلی +، رله اصلی-، رله شارژ +، رله شارژ -، رله پیش شارژ
(2) کنترل حرارتی
(3) عملکرد ارتباطی
(4) تشخیص خطا و هشدار
(5) عملکرد مقاوم در برابر خطا
۵.عملکردهای اصلی نرمافزار BMS
لتابع اندازهگیری
(1) اندازهگیری اطلاعات پایه: نظارت بر ولتاژ باتری، سیگنال جریان و دمای بسته باتری. اساسیترین عملکرد سیستم مدیریت باتری، اندازهگیری ولتاژ، جریان و دمای سلولهای باتری است که اساس تمام محاسبات سطح بالا و منطق کنترل سیستم مدیریت باتری است.
(2) تشخیص مقاومت عایق: کل سیستم باتری و سیستم ولتاژ بالا باید توسط سیستم مدیریت باتری از نظر عایق بودن آزمایش شوند.
(3) تشخیص قفل داخلی ولتاژ بالا (HVIL): برای تأیید صحت کل سیستم ولتاژ بالا استفاده میشود. هنگامی که صحت مدار سیستم ولتاژ بالا آسیب ببیند، اقدامات ایمنی فعال میشوند.
لتابع تخمین
(1) تخمین SOC و SOH: بخش اصلی و دشوار
(2) متعادلسازی: عدم تعادل ظرفیت SOC x بین مونومرها را از طریق یک مدار متعادلکننده تنظیم کنید.
(3) محدودیت توان باتری: توان ورودی و خروجی باتری در دماهای مختلف SOC محدود است.
لسایر عملکردها
(1) کنترل رله: شامل رله اصلی +، رله اصلی-، رله شارژ +، رله شارژ -، رله پیش شارژ
(2) کنترل حرارتی
(3) عملکرد ارتباطی
(4) تشخیص خطا و هشدار
(5) عملکرد مقاوم در برابر خطا
۶.معماری نرمافزار BMS
لمدیریت ولتاژ بالا و پایین
وقتی که به طور معمول روشن است، BMS توسط VCU از طریق یک سیگنال خط مستقیم یا CAN با ولتاژ ۱۲ ولت بیدار میشود. پس از اینکه BMS خودآزمایی را تکمیل کرد و وارد حالت آماده به کار شد، VCU یک فرمان ولتاژ بالا ارسال میکند و BMS بسته شدن رله را برای تکمیل اتصال ولتاژ بالا کنترل میکند. وقتی خاموش است، VCU یک فرمان ولتاژ پایین ارسال میکند و سپس بیدار شدن ۱۲ ولت را قطع میکند. وقتی که تفنگ برای شارژ در حالت خاموش قرار میگیرد، میتواند توسط سیگنال CP یا A+ بیدار شود.
لمدیریت شارژ
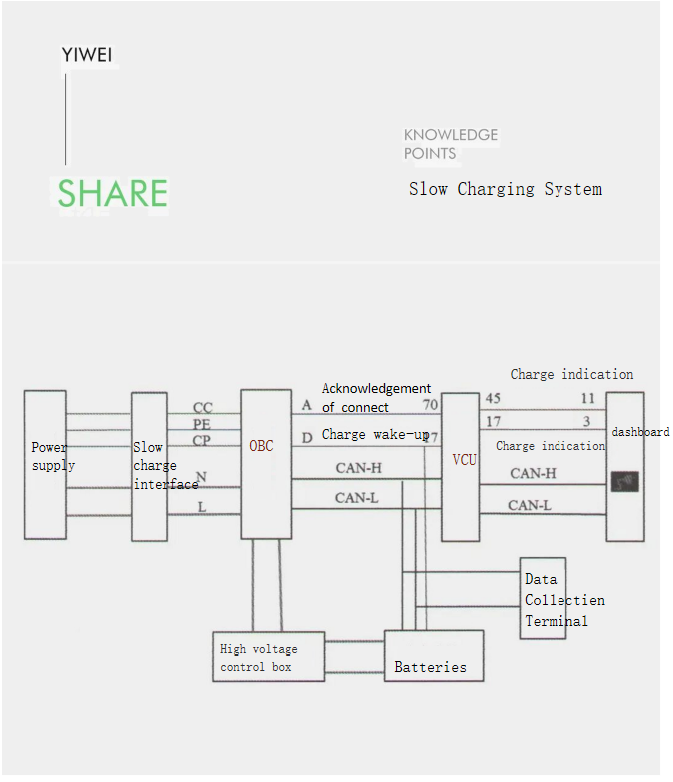
(1) شارژ آهسته
شارژ آهسته به معنای شارژ باتری با جریان مستقیم تبدیل شده از جریان متناوب توسط شارژر داخلی پیل شارژ (یا منبع تغذیه ۲۲۰ ولت) است. مشخصات پیل شارژ عموماً ۱۶ آمپر، ۳۲ آمپر و ۶۴ آمپر است و همچنین میتوان آن را از طریق منبع تغذیه خانگی شارژ کرد. BMS را میتوان با سیگنال CC یا CP بیدار کرد، اما باید اطمینان حاصل شود که پس از اتمام شارژ، میتواند به طور عادی به حالت خواب برود. فرآیند شارژ AC نسبتاً ساده است و میتواند مطابق با استانداردهای ملی دقیق توسعه یابد.
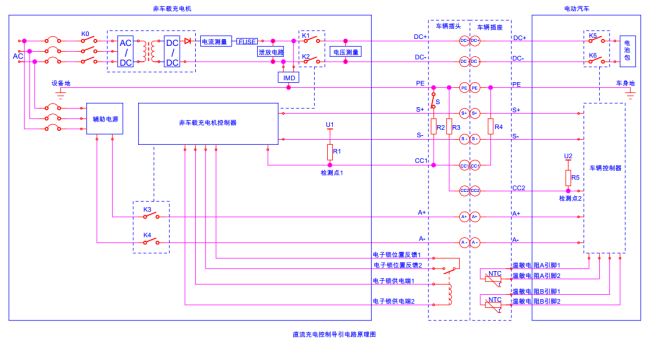
(2) شارژ سریع
شارژ سریع به معنای شارژ باتری با خروجی جریان مستقیم توسط شمع شارژ DC است که میتواند به نرخ شارژ 1C یا حتی بالاتر دست یابد. به طور کلی، 80٪ باتری را میتوان در 45 دقیقه شارژ کرد. میتوان آن را با سیگنال A+ منبع تغذیه کمکی شمع شارژ، بیدار کرد.
لتابع تخمین
(1) SOP (وضعیت توان) عمدتاً توان شارژ و دشارژ موجود باتری فعلی را با جستجوی جداول دما و SOC به دست میآورد. VCU بر اساس مقدار توان ارسالی، نحوه استفاده از کل وسیله نقلیه را تعیین میکند.
(2) SOH (وضعیت سلامت) عمدتاً وضعیت سلامت فعلی باتری را با مقداری بین 0 تا 100٪ مشخص میکند. به طور کلی تصور میشود که باتری پس از رسیدن به زیر 80٪ قابل استفاده نیست.
(3) SOC (وضعیت شارژ) متعلق به الگوریتم کنترل اصلی BMS است که وضعیت ظرفیت باقیمانده فعلی را مشخص میکند. این الگوریتم عمدتاً مبتنی بر روش انتگرال آمپر-ساعت و الگوریتم EKF (فیلتر کالمن توسعهیافته) است که با استراتژیهای اصلاح (مانند اصلاح ولتاژ مدار باز، اصلاح شارژ کامل، اصلاح پایان شارژ، اصلاح ظرفیت تحت دماهای مختلف و SOH و غیره) ترکیب شده است.
(4) الگوریتم SOE (وضعیت انرژی) به طور گسترده توسط تولیدکنندگان داخلی توسعه نیافته است یا از الگوریتمهای نسبتاً سادهای برای بدست آوردن نسبت انرژی باقیمانده در حالت فعلی به حداکثر انرژی موجود استفاده میکند. این تابع عمدتاً برای تخمین برد پیمایش باقیمانده استفاده میشود.
لتشخیص عیب
سطوح مختلف خطا بر اساس عملکرد متفاوت باتری متمایز میشوند و اقدامات پردازشی مختلفی توسط BMS و VCU تحت سطوح مختلف خطا، مانند هشدارها، محدودیت توان یا قطع مستقیم ولتاژ بالا، انجام میشود. خطاها شامل خطاهای جمعآوری و پردازش دادهها، خطاهای الکتریکی (حسگرها و محرکها)، خطاهای ارتباطی و خطاهای وضعیت باتری و غیره هستند.
۱.عملکردهای اصلی نرمافزار BMS
لتابع اندازهگیری
(1) اندازهگیری اطلاعات پایه: نظارت بر ولتاژ باتری، سیگنال جریان و دمای بسته باتری. اساسیترین عملکرد سیستم مدیریت باتری، اندازهگیری ولتاژ، جریان و دمای سلولهای باتری است که اساس تمام محاسبات سطح بالا و منطق کنترل سیستم مدیریت باتری است.
(2) تشخیص مقاومت عایق: کل سیستم باتری و سیستم ولتاژ بالا باید توسط سیستم مدیریت باتری از نظر عایق بودن آزمایش شوند.
(3) تشخیص قفل داخلی ولتاژ بالا (HVIL): برای تأیید صحت کل سیستم ولتاژ بالا استفاده میشود. هنگامی که صحت مدار سیستم ولتاژ بالا آسیب ببیند، اقدامات ایمنی فعال میشوند.
لتابع تخمین
(1) تخمین SOC و SOH: بخش اصلی و دشوار
(2) متعادلسازی: عدم تعادل ظرفیت SOC x بین مونومرها را از طریق یک مدار متعادلکننده تنظیم کنید.
(3) محدودیت توان باتری: توان ورودی و خروجی باتری در دماهای مختلف SOC محدود است.
لسایر عملکردها
(1) کنترل رله: شامل رله اصلی +، رله اصلی-، رله شارژ +، رله شارژ -، رله پیش شارژ
(2) کنترل حرارتی
(3) عملکرد ارتباطی
(4) تشخیص خطا و هشدار
(5) عملکرد مقاوم در برابر خطا
۲.معماری نرمافزار BMS
لمدیریت ولتاژ بالا و پایین
وقتی که به طور معمول روشن است، BMS توسط VCU از طریق یک سیگنال خط مستقیم یا CAN با ولتاژ ۱۲ ولت بیدار میشود. پس از اینکه BMS خودآزمایی را تکمیل کرد و وارد حالت آماده به کار شد، VCU یک فرمان ولتاژ بالا ارسال میکند و BMS بسته شدن رله را برای تکمیل اتصال ولتاژ بالا کنترل میکند. وقتی خاموش است، VCU یک فرمان ولتاژ پایین ارسال میکند و سپس بیدار شدن ۱۲ ولت را قطع میکند. وقتی که تفنگ برای شارژ در حالت خاموش قرار میگیرد، میتواند توسط سیگنال CP یا A+ بیدار شود.
لمدیریت شارژ
(1) شارژ آهسته
شارژ آهسته به معنای شارژ باتری با جریان مستقیم تبدیل شده از جریان متناوب توسط شارژر داخلی پیل شارژ (یا منبع تغذیه ۲۲۰ ولت) است. مشخصات پیل شارژ عموماً ۱۶ آمپر، ۳۲ آمپر و ۶۴ آمپر است و همچنین میتوان آن را از طریق منبع تغذیه خانگی شارژ کرد. BMS را میتوان با سیگنال CC یا CP بیدار کرد، اما باید اطمینان حاصل شود که پس از اتمام شارژ، میتواند به طور عادی به حالت خواب برود. فرآیند شارژ AC نسبتاً ساده است و میتواند مطابق با استانداردهای ملی دقیق توسعه یابد.
(2) شارژ سریع
شارژ سریع به معنای شارژ باتری با خروجی جریان مستقیم توسط شمع شارژ DC است که میتواند به نرخ شارژ 1C یا حتی بالاتر دست یابد. به طور کلی، 80٪ باتری را میتوان در 45 دقیقه شارژ کرد. میتوان آن را با سیگنال A+ منبع تغذیه کمکی شمع شارژ، بیدار کرد.
لتابع تخمین
(1) SOP (وضعیت توان) عمدتاً توان شارژ و دشارژ موجود باتری فعلی را با جستجوی جداول دما و SOC به دست میآورد. VCU بر اساس مقدار توان ارسالی، نحوه استفاده از کل وسیله نقلیه را تعیین میکند.
(2) SOH (وضعیت سلامت) عمدتاً وضعیت سلامت فعلی باتری را با مقداری بین 0 تا 100٪ مشخص میکند. به طور کلی تصور میشود که باتری پس از رسیدن به زیر 80٪ قابل استفاده نیست.
(3) SOC (وضعیت شارژ) متعلق به الگوریتم کنترل اصلی BMS است که وضعیت ظرفیت باقیمانده فعلی را مشخص میکند. این الگوریتم عمدتاً مبتنی بر روش انتگرال آمپر-ساعت و الگوریتم EKF (فیلتر کالمن توسعهیافته) است که با استراتژیهای اصلاح (مانند اصلاح ولتاژ مدار باز، اصلاح شارژ کامل، اصلاح پایان شارژ، اصلاح ظرفیت تحت دماهای مختلف و SOH و غیره) ترکیب شده است.
(4) الگوریتم SOE (وضعیت انرژی) به طور گسترده توسط تولیدکنندگان داخلی توسعه نیافته است یا از الگوریتمهای نسبتاً سادهای برای بدست آوردن نسبت انرژی باقیمانده در حالت فعلی به حداکثر انرژی موجود استفاده میکند. این تابع عمدتاً برای تخمین برد پیمایش باقیمانده استفاده میشود.
لتشخیص عیب
سطوح مختلف خطا بر اساس عملکرد متفاوت باتری متمایز میشوند و اقدامات پردازشی مختلفی توسط BMS و VCU تحت سطوح مختلف خطا، مانند هشدارها، محدودیت توان یا قطع مستقیم ولتاژ بالا، انجام میشود. خطاها شامل خطاهای جمعآوری و پردازش دادهها، خطاهای الکتریکی (حسگرها و محرکها)، خطاهای ارتباطی و خطاهای وضعیت باتری و غیره هستند.
تماس با ما:
yanjing@1vtruck.com +(86)13921093681
duanqianyun@1vtruck.com +(86)13060058315
liyan@1vtruck.com +(86)18200390258
زمان ارسال: ۱۲ مه ۲۰۲۳



